目录
围棋考级对弈机器人 PRD 2.0
版本:2.0 | 更新日期:2026-03-09 上一版本:PRD 1.0(情感陪伴机器人+围棋扩展模块) 本版核心变更:聚焦围棋对弈机器人本体,砍掉情感陪伴系统,新增考级/赛事/防作弊商业闭环
一、产品定位与价值主张
1.1 核心定位
一台能在真实棋盘上与人对弈的围棋机器人,同时具备线上考级防作弊能力和专业棋钟功能。
区别于元萝卜、阿尔法蛋等竞品的"教学陪练"定位,本产品以考级/赛事工具为核心切入点,通过围棋协会独家合作构建竞争壁垒。
1.2 差异化价值
| 维度 | 竞品现状 | 我们的差异 |
|---|---|---|
| 防作弊 | 无解决方案 | 软件AI吻合度检测 + 硬件摄像头监控双管齐下 |
| 线上考级 | 不支持 | 围棋协会独家认证,机器即考试终端 |
| 棋钟 | 不具备 | 内置专业棋钟,符合赛事标准 |
| 价格 | ¥3799-4999 | ¥1999,不到竞品一半 |
| 商业模式 | 一次性硬件收入 | 硬件低利润 + 考试/认证/平台持续服务收入 |
1.3 目标用户
核心用户(一代机优先服务):
- 围棋培训机构学员(6-15岁为主),全国约300万考级考段需求人群
- 培训机构本身(B端采购,用于教学和组织考试)
次要用户:
- 围棋爱好者家庭(家庭自练、亲子对弈)
- 各地棋院/围棋协会(赛事组织、裁判管理)
1.4 使用场景优先级
| 优先级 | 场景 | 说明 |
|---|---|---|
| P0 | 线上考级考段 | 用户通过机器人参加远程定级定段考试,全程防作弊监控 |
| P0 | AI对弈练习 | 机械臂落子的真实对弈体验,多级别AI适配不同棋力 |
| P1 | 线上赛事 | 双方各持一台机器人进行远程实体对弈,实时同步棋局 |
| P1 | 教学辅助 | 培训机构课后练习,AI陪练+做题+复盘 |
| P2 | 人人对弈 | 两人共用一台机器人,机器充当棋钟+记谱+裁判 |
| P2 | 复盘演示 | 机械臂按棋谱自动回放棋局 |
二、商业模式
2.1 定价策略
"剃刀+刀片"模型:硬件低利润走量,服务持续变现。
| 项目 | 金额 |
|---|---|
| 零售价 | ¥1999 |
| BOM成本 | ¥1500 |
| 渠道/物流/售后 | ¥200 |
| 单台硬件净利 | ¥299(微利) |
2.2 服务收入结构
| 收入来源 | 单价 | 频次 | 说明 |
|---|---|---|---|
| 考级报名费 | ¥450/次 | 年1-3次/人 | 与围棋协会分成,平台抽取服务费 |
| 制证费 | ¥50/次 | 随考级 | 电子证书+实体证书 |
| 赛事组织佣金 | 按赛事规模 | 持续 | 平台收取赛事技术服务费 |
| 教学内容订阅 | ¥40/月 | 月付 | AI题库、定式库、名局解析等增值内容 |
| 录像存储服务 | ¥10/月 | 可选 | 对局录像云端存储与回看 |
2.3 财务模型(1万台装机量测算)
 商业模式 — 剃刀+刀片模型
商业模式 — 剃刀+刀片模型
📋 详细测算数据
一次性收入:
硬件销售 1万台 × ¥1999 = ¥1999万
硬件成本 1万台 × ¥1700(BOM+渠道) = ¥1700万
硬件净利 = ¥299万
年化服务收入(持续):
考级报名 8000人次 × ¥450 = ¥360万
制证费用 8000人次 × ¥50 = ¥40万
赛事佣金 = ¥80万
教学订阅 4000用户 × ¥40 × 12 = ¥192万
──────────────────────────────────────
年化服务总收入 = ¥672万(毛利80%+)
年化服务净利 ≈ ¥500万+
2.4 渠道策略
- 培训机构直销:给予10-15%渠道返点,机构同时是分销商和考级组织者
- 围棋协会推荐:独家合作协议,协会指定考级设备
- 线上自营:京东/天猫旗舰店直销
- 避免传统经销商层层加价(科大讯飞失败教训)
三、产品架构
3.1 系统架构
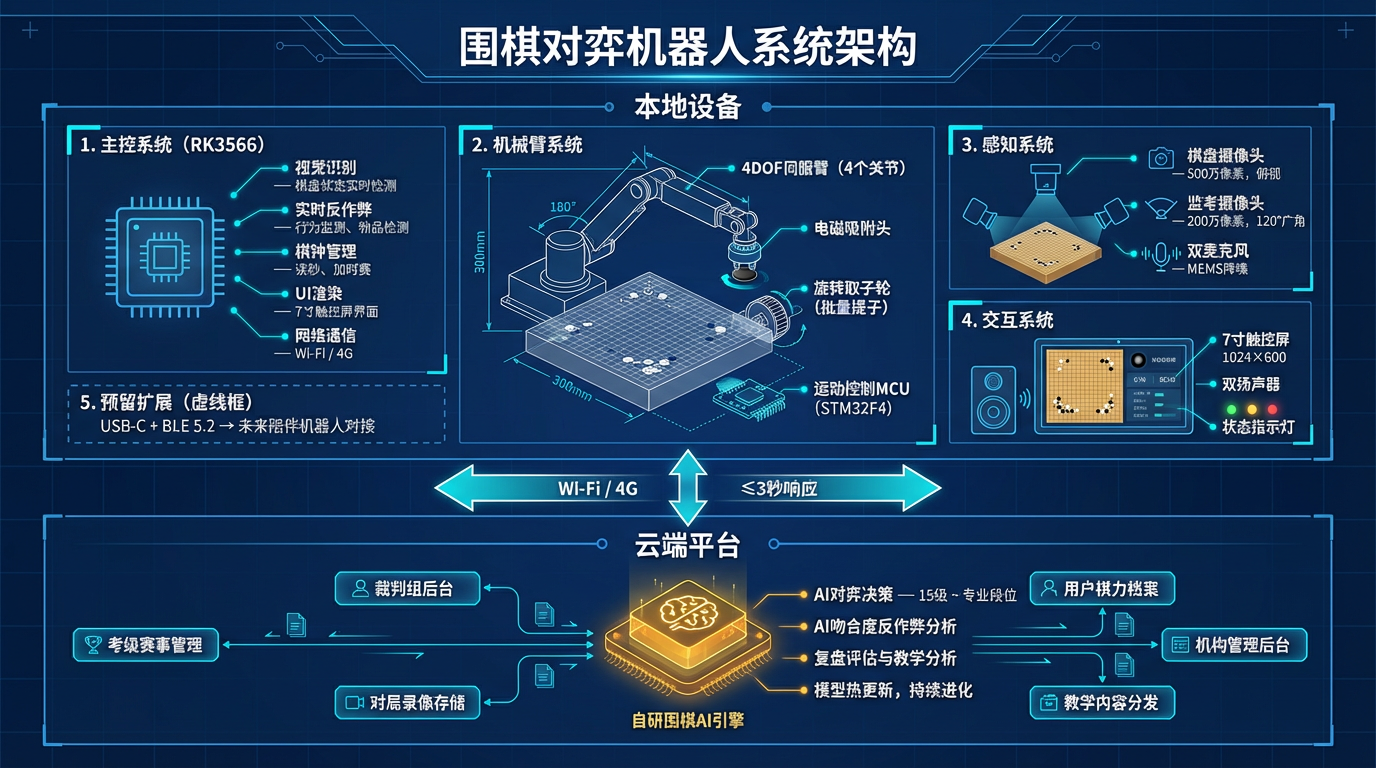 围棋对弈机器人系统架构
围棋对弈机器人系统架构
3.2 核心设计原则
- 考级优先:所有功能优先保障考级场景流畅运行
- 云端AI,本地监控:围棋AI引擎全自研、云端运行;本地低算力芯片专注实时视觉识别和行为监测类反作弊
- 安全合规:监考录像仅保留72小时,遵守《未成年人保护法》与《个人信息保护法》
- 模块化预留:软硬件接口标准化,为未来陪伴机器人扩展做预留
- 网络依赖管理:AI对弈和考级需联网;棋钟、人人对弈模式可离线使用
四、硬件规格
4.1 核心BOM清单
| 模块 | 组件 | 规格 | 预估成本 |
|---|---|---|---|
| 主控 | SoC | RK3566(四核A53@1.8GHz,0.8TOPS NPU) | ¥65 |
| 本地仅负责视觉识别、UI渲染、实时反作弊监控 | |||
| 内存 | 2GB LPDDR4x | ¥20 | |
| 存储 | 16GB eMMC + TF卡扩展 | ¥30 | |
| Wi-Fi/BT | Wi-Fi 5 + BLE 5.2 模组 | ¥20 | |
| 机械臂 | 伺服电机×4 | 高精度数字伺服,分辨率≤0.1° | ¥120 |
| 运动控制MCU | STM32F4系列,实时运动控制 | ¥15 | |
| 电磁吸附模组 | 电磁铁 + 驱动电路 | ¥20 | |
| 旋转取子轮 | 多子批量拾取机构 | ¥25 | |
| 结构件 | 注塑ABS+PC合金,4个关节 | ¥50 | |
| 力矩/碰撞传感 | 末端力矩传感器 | ¥15 | |
| 视觉 | 棋盘摄像头 | 500万像素,顶部俯视安装 | ¥35 |
| 监考摄像头 | 200万像素,120°广角,面向用户 | ¥30 | |
| 补光LED | 可控色温LED环形补光 | ¥8 | |
| 显示 | 触控屏 | 7寸IPS,1024×600,电容触控 | ¥65 |
| 音频 | 扬声器×2 | 2W全频扬声器 | ¥10 |
| 麦克风×2 | MEMS麦克风,支持降噪 | ¥6 | |
| 电源 | 锂电池 | 5000mAh,支持2-3小时离线使用 | ¥45 |
| 充电/电源管理 | Type-C PD充电 + PMU | ¥15 | |
| 棋具 | 棋子(全套) | 新云子/仿玉材质,内嵌钕磁铁,361颗 | ¥80 |
| 棋盘 | 19×19标准棋盘,集成于机身顶面 | ¥30 | |
| 棋碗×2 | 一体化设计,嵌入机身两侧 | ¥15 | |
| 结构 | 外壳 | ABS+PC合金注塑,模具级工艺 | ¥60 |
| PCB主板 | 6层PCB,集成主控+电源+接口 | ¥40 | |
| 线缆/连接器 | 内部布线 | ¥10 | |
| 扩展 | 预留接口 | USB-C扩展口(未来陪伴机器人对接) | ¥5 |
| 4G模组(可选) | LTE Cat.4(选配版本) | 可选+¥35 | |
| 合计 | ¥1424 |
BOM 节省说明:AI引擎云端运行后,主控从RK3576(¥120)降至RK3566(¥65),内存从4GB(¥40)降至2GB(¥20),合计节省¥75。节省部分可重新分配至机械臂精度提升或棋子材质升级,或直接降低BOM提升硬件利润空间。
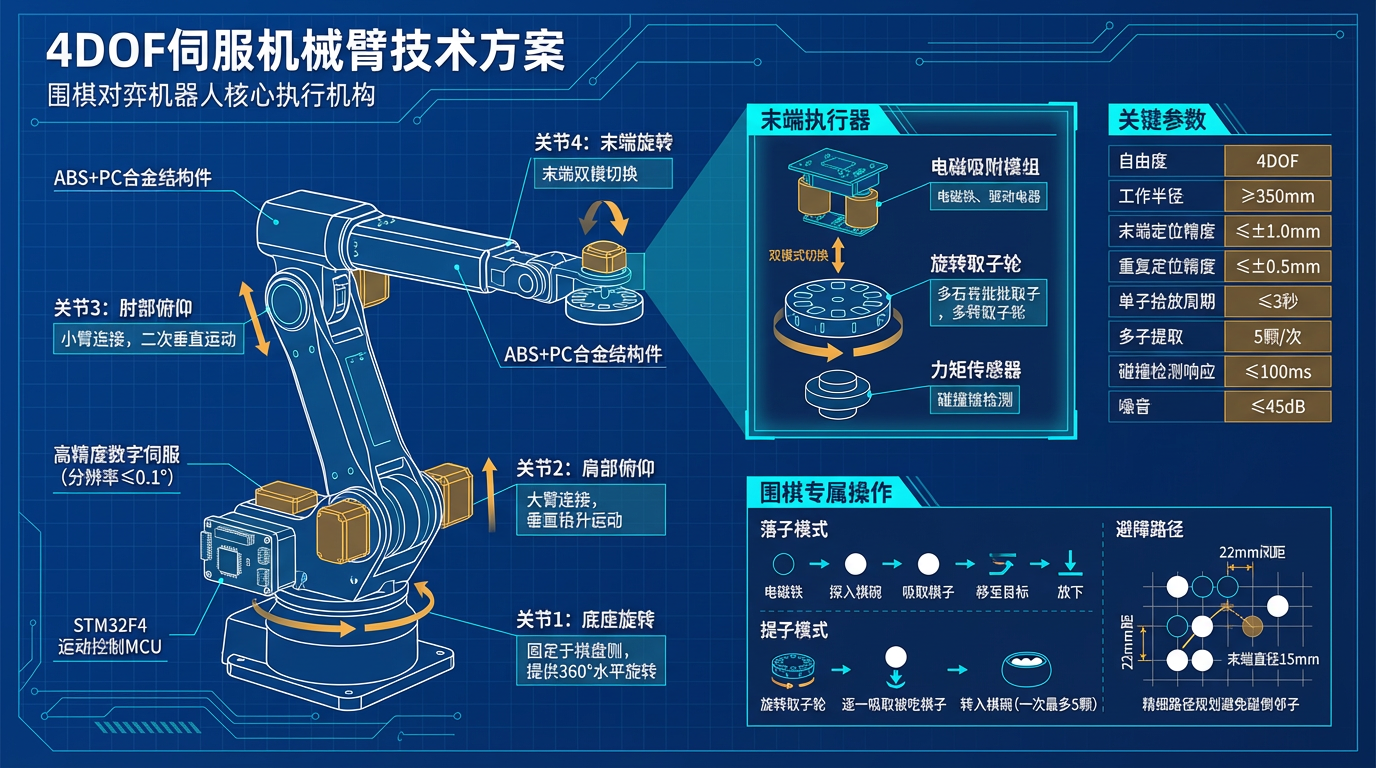
4.2 机械臂技术方案
方案:4DOF伺服机械臂 + 电磁吸附 + 旋转取子轮
 4DOF伺服机械臂技术方案
4DOF伺服机械臂技术方案
关键参数:
| 参数 | 指标 |
|---|---|
| 自由度 | 4DOF(底座旋转+肩部俯仰+肘部俯仰+末端旋转) |
| 工作半径 | ≥350mm(覆盖19×19棋盘 + 两侧棋碗) |
| 末端定位精度 | ≤±1.0mm |
| 重复定位精度 | ≤±0.5mm |
| 单子拾放周期 | ≤3秒 |
| 多子提取 | 旋转轮一次最多提取5颗子 |
| 安全保护 | 力矩传感碰撞检测,≤100ms响应 |
| 噪音 | ≤45dB |
围棋特殊要求处理:
- 提子(吃子):旋转取子轮机构,电磁铁逐一吸取被吃棋子,转入棋碗。一次提多子时,轮盘旋转逐一吸取,效率远高于单颗拾放
- 棋碗取子(落新子):电磁铁探入棋碗,吸取一颗棋子,移动到目标位置放下
- 碰撞避免:围棋子间距约22mm,机械臂运动规划需包含避障路径,避免碰倒邻子
4.3 整机物理规格
| 参数 | 规格 |
|---|---|
| 整机尺寸(含棋盘) | 约 520mm × 480mm × 150mm(机械臂收起) |
| 整机重量 | ≤4.5kg |
| 棋盘规格 | 19×19标准线距(约22mm格距) |
| 供电 | Type-C PD 45W充电,内置5000mAh电池 |
| 工作温度 | 0°C ~ 40°C |
| 工作湿度 | 20% ~ 80% RH |
五、软件功能需求
5.1 围棋AI引擎(全自研,云端运行)
架构:完全自研AI引擎,部署在云端,本地设备不承担AI推理计算。
📌 核心流程:以下信息图展示了线上考级场景下,考生、机器人、云端平台、裁判组之间的完整交互流程。
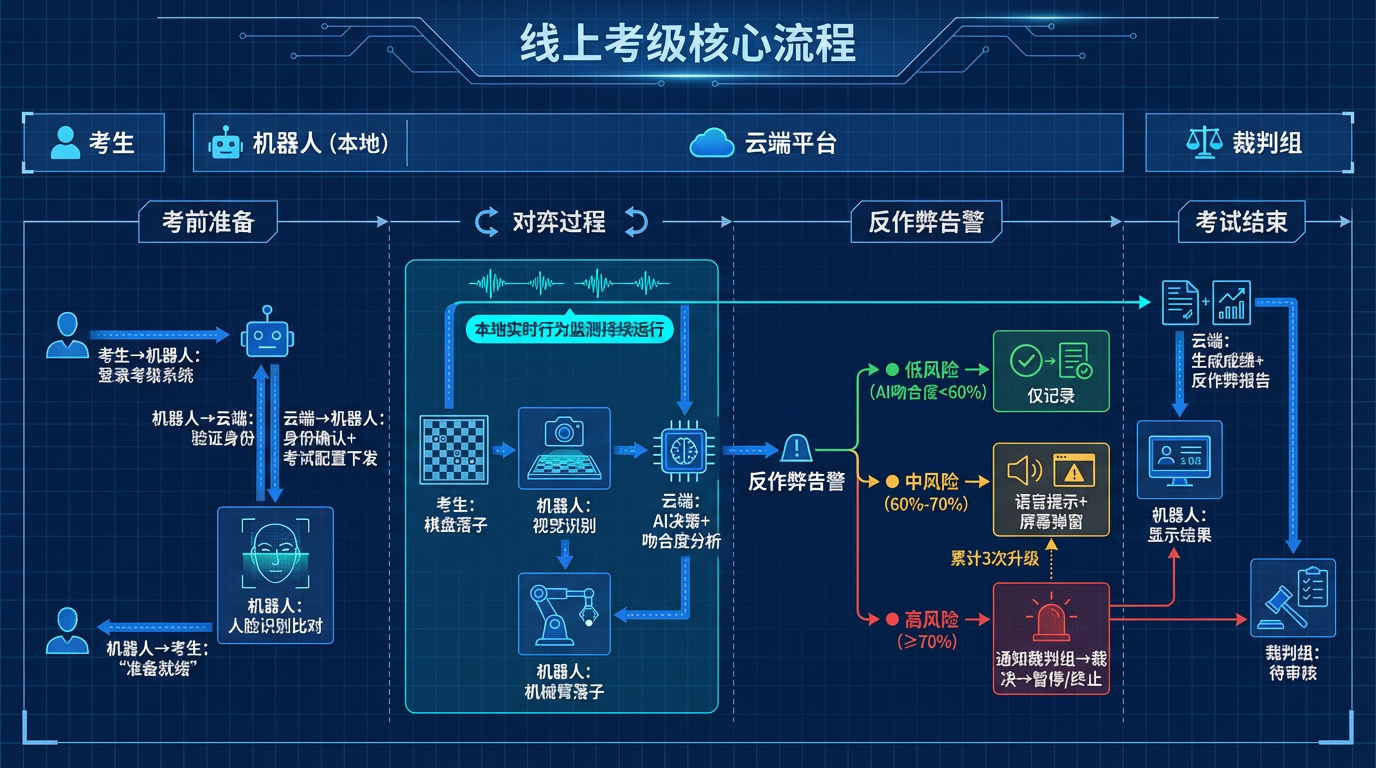 线上考级核心流程
线上考级核心流程
| 功能 | 要求 |
|---|---|
| 算法方案 | 完全自研围棋AI引擎,独立知识产权 |
| 部署方式 | 云端运行,设备通过网络发送棋局状态、接收AI决策 |
| 棋力范围 | 覆盖入门(15级)到专业(业余5段+),至少20个等级 |
| 棋盘支持 | 9×9、13×13、19×19 |
| 响应延迟 | 云端单步决策 ≤3秒(含网络传输) |
| 教学模式 | 可根据学员水平动态调整棋力,提供"让子"功能 |
| 评估分析 | 实时胜率计算、候选手推荐、局面评估 |
| 复盘支持 | 对局结束后生成复盘报告,标注关键失误和好手 |
| 离线降级 | 断网时本地提供基础棋力(入门级)的轻量引擎作为降级方案 |
云端AI引擎优势:
- 算力无上限,可提供超人类水平棋力
- 模型迭代升级无需OTA推送,云端热更新
- 多用户共享GPU算力,成本远低于端侧NPU
- 可接入自研反作弊吻合度分析,AI对弈与反作弊共用同一引擎
5.2 棋盘视觉识别
| 功能 | 要求 |
|---|---|
| 识别精度 | 黑白棋子分类准确率 ≥99.5% |
| 响应速度 | 棋局变化检测延迟 ≤1.0秒 |
| 光照适应 | 100-2000 lux 正常工作,LED补光辅助 |
| 材质兼容 | 标配磁性棋子,后续可支持普通棋子识别模式 |
| 空位检测 | 准确检测提子后的空位变化 |
| 标定方案 | 出厂标定 + 开机自动校准 |
5.3 棋钟系统
| 功能 | 要求 |
|---|---|
| 计时模式 | 基本读秒、加时赛(Fischer)、包干制 |
| 显示 | 7寸触控屏双方时间同屏显示 |
| 触发方式 | 屏幕触控 / 棋盘落子自动检测触发 |
| 声音提示 | 读秒语音播报、超时警告 |
| 考级适配 | 符合中国围棋协会线上考级计时标准 |
| 暂停/续弈 | 支持裁判远程暂停/恢复 |
5.4 监考反作弊系统
本节继承 PRD 1.0 反作弊系统设计,并根据硬件升级做适配调整。
5.4.1 系统设计原则
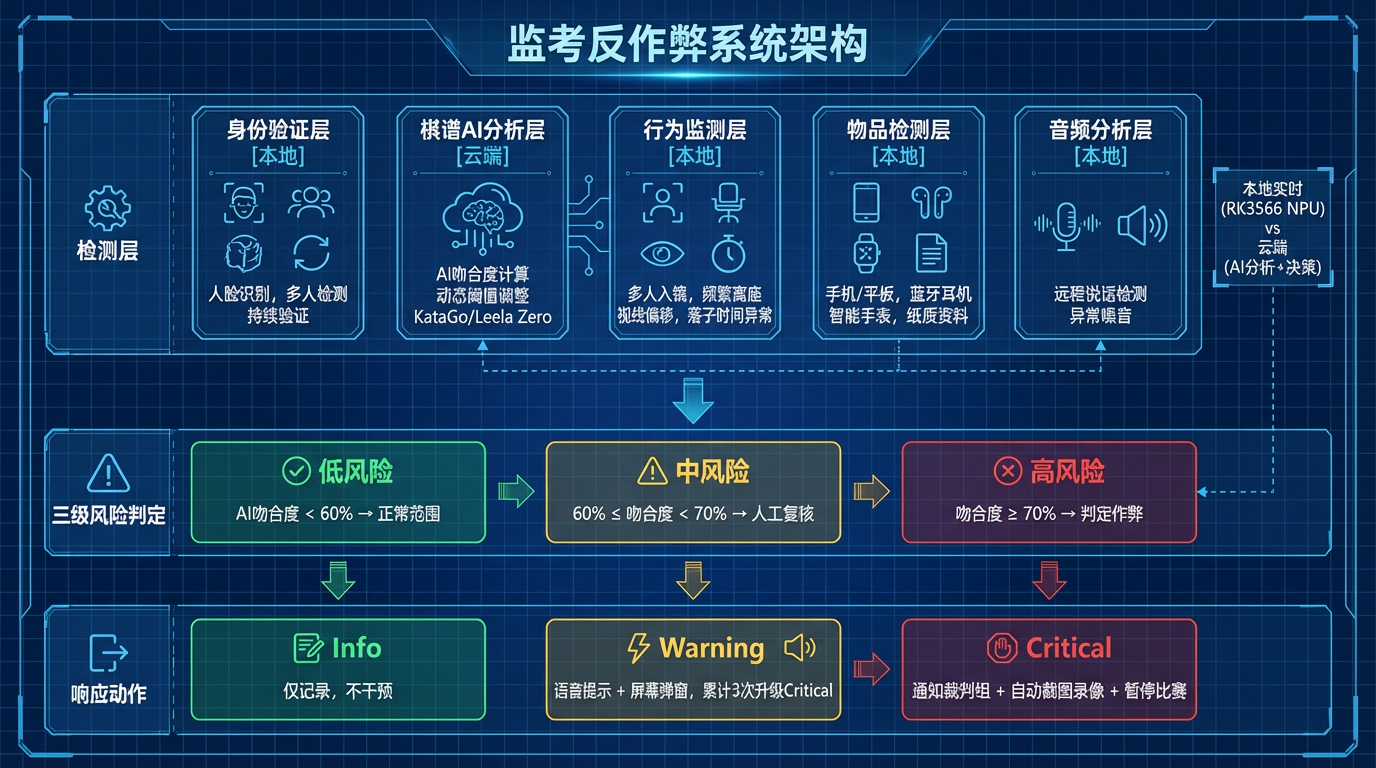 监考反作弊系统架构
监考反作弊系统架构
- 公平竞赛优先:所有检测和处理机制以维护比赛公平公正为首要目标
- 证据链完整性:棋谱分析、行为监测、录像取证、历史数据多维度交叉验证
- 分级响应机制:根据风险等级采取差异化处理策略
- 双向审查制度:防范恶意举报,保护选手合法权益
- 隐私保护合规:遵守《未成年人保护法》与《个人信息保护法》,录像仅保留72小时备查
5.4.2 本地与云端分工
| 层级 | 运行位置 | 说明 |
|---|---|---|
| 行为监测(人脸、多人、离座、视线) | 本地实时 | RK3566 NPU运行轻量检测模型,低延迟 |
| 物品检测(手机、耳机等) | 本地实时 | 本地视觉模型识别违规物品 |
| 音频分析(异常声音、说话检测) | 本地实时 | 本地VAD+关键词检测 |
| 棋谱AI吻合度分析 | 云端 | 自研AI引擎同步分析,算力充足 |
| 告警决策与风险判定 | 云端 | 综合本地上报数据,云端做最终判定 |
| 录像录制与缓存 | 本地 | 本地录制,事件触发时上传片段至云端 |
5.4.3 作弊检测能力矩阵
身份验证层
- 人脸识别:比赛开始前通过监考摄像头确认考生身份
- 持续验证:对局过程中定期抽查人脸匹配
- 多人检测:识别画面中出现多人
- 身份替换告警:检测中途更换对弈者
棋谱AI分析层
- 支持KataGo、Leela Zero等主流AI引擎进行吻合度分析
- 实时计算AI吻合度(每手棋与AI推荐选点的匹配率)
- 动态阈值(根据棋手年龄、级别、局面复杂度调整)
- 三级风险判定:
- 低风险(AI吻合度 < 60%):正常范围
- 中风险(60% ≤ AI吻合度 < 70%):进入人工复核
- 高风险(AI吻合度 ≥ 70%):直接判定作弊
行为监测层
- 多人入镜检测(监考摄像头)
- 频繁离座告警
- 视线偏移追踪(疑似看其他屏幕)
- 落子时间异常分析(过于均匀或复杂局面瞬间落子)
物品检测层
- 违规设备检测:手机、平板、蓝牙耳机、智能手表
- 纸质资料检测:棋谱书、笔记
音频分析层
- 远程声音检测:识别画面外有人说话
- 环境噪音异常:检测疑似操作其他设备的声音
5.4.4 告警与记录系统
三级告警机制:
| 级别 | 触发条件 | 响应动作 |
|---|---|---|
| Info | 轻微视线偏移、短暂离座(<30秒) | 仅记录,不干预 |
| Warning | 离座>30秒、检测到手机、视线长时间偏离 | 语音提示 + 屏幕弹窗,累计3次升级Critical |
| Critical | 多人入镜、AI吻合度≥70%、蓝牙耳机 | 通知裁判组 + 自动截图录像 + 可暂停比赛 |
数据记录与导出:
- 全程录像(面部+双手+棋盘画面)
- 完整棋谱及AI分析报告
- 所有告警事件列表(时间、类型、级别、截图)
- 行为数据统计(离座次数、视线偏移时长、落子时间分布)
- 录像保留72小时后自动删除,仅限裁判组访问
5.4.5 投诉与裁判机制
三级裁判体系:
- 地区裁判组:各地2名职业棋手,负责初步裁定
- 总裁判组:对地区裁判不服可申诉
- 反坐机制:双向审查防止恶意举报
处理流程:
- 比赛结束后30分钟内可提交举报
- 低风险:可驳回,不服可向总裁判组申诉
- 中风险:人工复核,可要求下轮开摄像头或到线下校区监赛
- 高风险:直接判负、取消成绩、退赛
5.5 线上对弈与赛事系统
| 功能 | 要求 |
|---|---|
| 远程对弈 | 两台机器人通过云端实时同步棋局,一方落子后对方机械臂自动跟随 |
| 赛事大厅 | 支持赛事报名、配对、赛程管理 |
| 观战模式 | 支持教练/观众通过App实时观看对局和AI分析 |
| 棋谱同步 | 所有对局自动记录SGF格式棋谱,同步至云端 |
| 延迟要求 | 双方棋局同步延迟 ≤2秒 |
5.6 触控屏交互界面
主要界面:
- 首页:快速开始对弈、考级入口、赛事大厅、个人中心
- 对弈界面:实时棋盘状态、双方棋钟、AI评估信息
- 考级界面:考试倒计时、监考状态指示、规则提示
- 设置界面:AI难度、棋钟模式、Wi-Fi配置、音量调节
5.7 App端功能(手机配套)
| 功能 | 说明 |
|---|---|
| 设备绑定 | 扫码绑定机器人,BLE/Wi-Fi连接 |
| 复盘回看 | 查看历史对局棋谱和AI分析报告 |
| 考级管理 | 报名、缴费、查看成绩和证书 |
| 远程观战 | 实时观看对局画面和棋局状态 |
| OTA升级 | 固件和AI模型远程更新 |
| 棋力档案 | 个人棋力成长曲线、对局统计 |
六、云端平台架构
6.1 平台功能模块
| 模块 | 面向角色 | 核心功能 |
|---|---|---|
| 考级管理系统 | 围棋协会/棋院 | 考试发布、考生管理、成绩审核、证书签发 |
| 裁判管理后台 | 裁判组 | 实时监控、告警处理、录像回看、裁决记录 |
| 赛事管理系统 | 机构/协会 | 赛事创建、选手配对、赛程编排、成绩排名 |
| 机构管理后台 | 培训机构 | 学员管理、设备管理、考级报名、教学数据 |
| 用户服务平台 | 家长/学生 | 报名缴费、成绩查询、棋力档案、对局记录 |
| 数据分析平台 | 运营团队 | 设备活跃度、考级转化率、收入统计、风控监控 |
6.2 与围棋协会系统对接
- 考级认证数据流:本地考试 → 云端上传 → 协会审核 → 证书签发
- 成绩互通:对接中国围棋协会等级分系统
- 赛事授权:支持协会授权的各类线上赛事
七、陪伴机器人扩展预留
一代机砍掉情感陪伴系统,但预留以下接口供未来扩展。
7.1 硬件预留
| 接口 | 用途 |
|---|---|
| USB-C扩展口 | 数据传输 + 供电(支持PD双向供电) |
| BLE 5.2 | 低功耗无线连接陪伴模块 |
| 机械安装位 | 机身预留标准螺丝孔位,供陪伴模块物理对接 |
| 音频通道 | 已有双扬声器+双麦克风,可直接被陪伴系统复用 |
7.2 软件预留
| 接口 | 用途 |
|---|---|
| 事件总线 | 棋局状态变化、AI分析结果等事件可向外广播 |
| 插件架构 | 主控软件采用插件式设计,陪伴模块以插件形式加载 |
| 情感状态接口 | 预留情感状态枚举(开心/思考/紧张等),供未来表情系统调用 |
7.3 未来陪伴机器人(Gen 2)愿景
- 表情LED面板 / 机械耳朵 / 触感反馈
- 多轮语音对话(围棋教学、日常聊天)
- 个性化情感陪伴
- 通过标准接口"骑"在围棋机器人上,形成完整形态
八、关键技术风险与对策
| 风险 | 影响 | 对策 |
|---|---|---|
| 提子机构专利 | 元萝卜旋转轮方案可能有专利 | 进行专利检索,设计差异化取子机构(如线性滑轨+电磁铁阵列) |
| 网络依赖风险 | AI对弈和考级强依赖网络 | Wi-Fi+可选4G双通道;本地缓存轻量引擎做离线降级;考级场景要求稳定网络为前置条件 |
| 云端AI延迟 | 影响对弈体验流畅度 | CDN边缘节点部署、请求预测、服务端推理优化,目标≤3秒响应 |
| 视觉识别在复杂光照下准确率 | 影响考试可靠性 | LED补光系统 + 多帧融合 + 异常检测自动校准 |
| 机械臂碰倒邻子 | 围棋子间距22mm较密 | 精细路径规划 + 末端夹持直径控制在15mm以内 |
| 磁性棋子与传统棋子手感差异 | 用户接受度 | 选用高品质仿玉/云子材质,磁铁内嵌不影响外观手感 |
| 云端服务成本 | GPU推理成本随用户量增长 | 模型量化优化、请求合并批处理、按需弹性扩缩容 |
九、项目里程碑
9.1 一代机开发计划
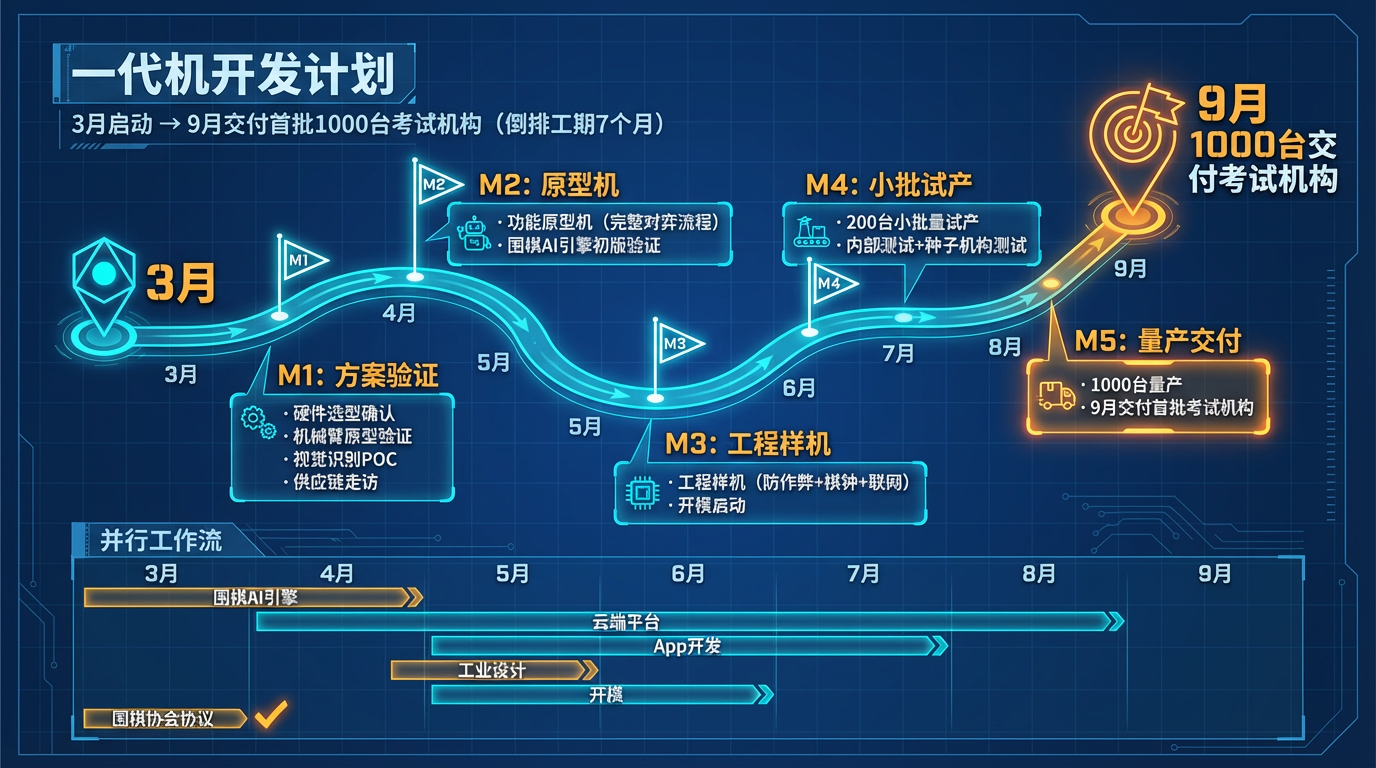 一代机开发计划路线图
一代机开发计划路线图
⚠️ 硬交付节点:9月首批1000台交付考试机构,倒排工期如下。
| 阶段 | 时间 | 交付物 |
|---|---|---|
| M1: 方案验证 | 3月 | 硬件选型确认、机械臂原型验证、视觉识别POC、供应链走访 |
| M2: 原型机 | 4月 | 功能原型机(可完成完整对弈流程)、围棋AI引擎初版验证 |
| M3: 工程样机 | 5-6月 | 工程样机(含防作弊、棋钟、联网功能)、开模启动 |
| M4: 小批试产 | 7月 | 200台小批量试产,内部测试+种子机构测试 |
| M5: 量产交付 | 8-9月 | 1000台量产,9月交付首批考试机构 |
9.2 关键依赖
| 依赖项 | 负责人 | 时间节点 |
|---|---|---|
| 围棋协会独家合作协议签订 | Felix | 3月内完成 |
| 供应链走访与硬件方案确认 | 张帆 | 3月第2周 |
| 围棋AI引擎算法验证 | 云龙团队 | 3-4月 |
| 反作弊算法方案设计 | 云龙团队+张帆 | 4月 |
| 工业设计 | 外包/内部 | 4-5月 |
| 开模 | 供应链 | 5月启动,6月底完成 |
| 云端平台开发 | 待组建 | 4-7月 |
| App开发 | 待组建 | 5-7月 |
| 首批1000台交付考试机构 | 全团队 | 9月 |
十、团队与分工
| 角色 | 人员 | 职责 |
|---|---|---|
| 产品经理 | 张帆 | PRD、需求管理、供应链对接、项目协调 |
| 算法负责人 | 云龙 | 围棋AI引擎、视觉识别、反作弊算法 |
| 算法团队 | 北大AI实验室 | 算法研发支持 |
| 商务/战略 | Felix | 围棋协会合作、市场策略、融资 |
| 运营/市场 | 叶靖波 | 团队组建、运营管理 |
| 营销推广 | 张子杰 | 产品上线传播推广 |
| 待补充 | 嵌入式工程师、硬件工程师、后端工程师、前端/App工程师 |
附录
A. 术语定义
| 术语 | 说明 |
|---|---|
| AI吻合度 | 每手棋与AI推荐选点的匹配率,用于反作弊判定 |
| SGF | Smart Game Format,围棋棋谱标准格式 |
| NPU | Neural Processing Unit,神经网络处理单元 |
| CoreXY | 一种2D平面运动机构(已排除,不适用围棋提子) |
| SCARA | Selective Compliance Assembly Robot Arm,平面关节机械臂 |
B. 竞品参考
| 竞品 | 售价 | 机械方案 | 我方优势 |
|---|---|---|---|
| 元萝卜围棋专业版 | ¥3799 | 3DOF臂+电磁+旋转轮 | 价格优势+防作弊+考级 |
| 元萝卜五合一 | ¥2999 | 机械臂+混合取子 | 价格+专业围棋聚焦 |
| 阿尔法蛋围棋 | ¥4999 | 工业级机械臂 | 价格优势显著 |
| 科大讯飞 | ¥5000+ | 重型方案 | 价格+便携性+聚焦围棋 |
C. PRD 1.0 → 2.0 变更记录
| 变更项 | PRD 1.0 | PRD 2.0 |
|---|---|---|
| 产品定位 | 情感陪伴机器人+围棋扩展模块 | 围棋对弈机器人(砍掉陪伴,预留接口) |
| 硬件形态 | 双机协同(主控+GBM-19) | 一体化单机 |
| AI引擎 | 本地运行,依赖高算力NPU | 全自研,云端运行,本地低算力芯片仅做实时反作弊监控 |
| 主控芯片 | RK3587(≥6TOPS) | RK3566(0.8TOPS),成本大幅降低 |
| 棋钟 | 未涉及 | P0核心功能 |
| 商业模式 | 未涉及 | 硬件低利润+服务持续盈利 |
| 定价 | 未涉及 | ¥1999,BOM ¥1424 |
| 机械臂 | 独立算力+独立视觉 | 主控统一计算,机械臂仅执行 |
| 陪伴系统 | 核心功能 | 砍掉,预留扩展接口 |
| 云端平台 | 未涉及 | 自研AI引擎 + 考级/赛事/裁判/机构管理全平台 |